- Home ›
- News & Events›
- Press Releases
News & Events
Press Releases
Epson IMU used for Free-flying Camera Robot on the International Space Station
July 2024
Epson IMU used for Free-flying Camera Robot on the International Space Station
IMU assists stabilisation control for flight and automated docking for battery charging
SYDNEY, 31 July 2024 – Recently an inertial measurement unit (IMU) from Epson's M-G370 series was selected by the Japan Aerospace Exploration Agency (JAXA) for use in a mobile camera robot deployed on "Kibo", the Japanese Experiment Module (JEM) on the International Space Station (ISS).
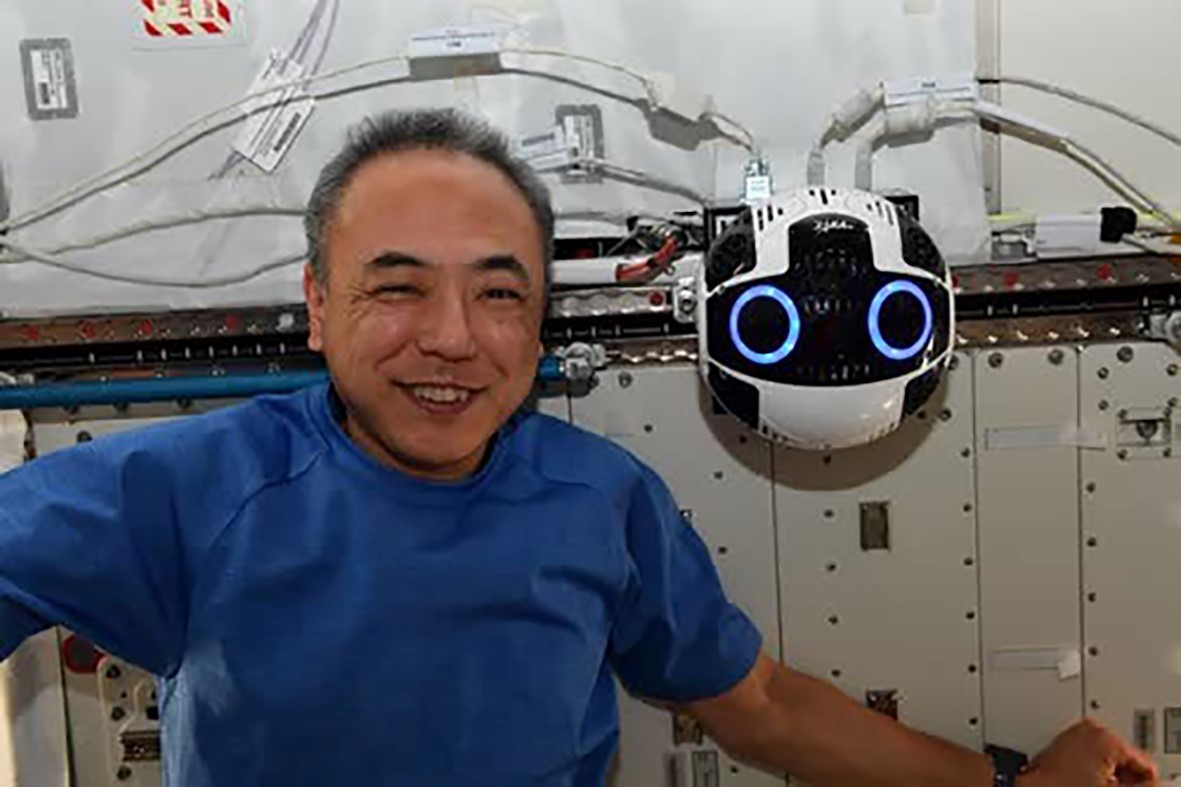
Astronaut Satoshi Furukawa and Int-Ball2 as it docks at the docking station© JAXA/NASA
Developed by JAXA, the "Int-Ball2 (Internal Ball Camera 2)" free-flying camera robot, has been undergoing functional verification inside Kibo since June 2023.
From fiscal 2024 onward, Epson will pursue the development of IMUs for the so-called "New Space" sector. These IMUs will be used in things such as small satellites that utilise consumer and industrial products, which require higher levels of cost performance and shorter delivery times.
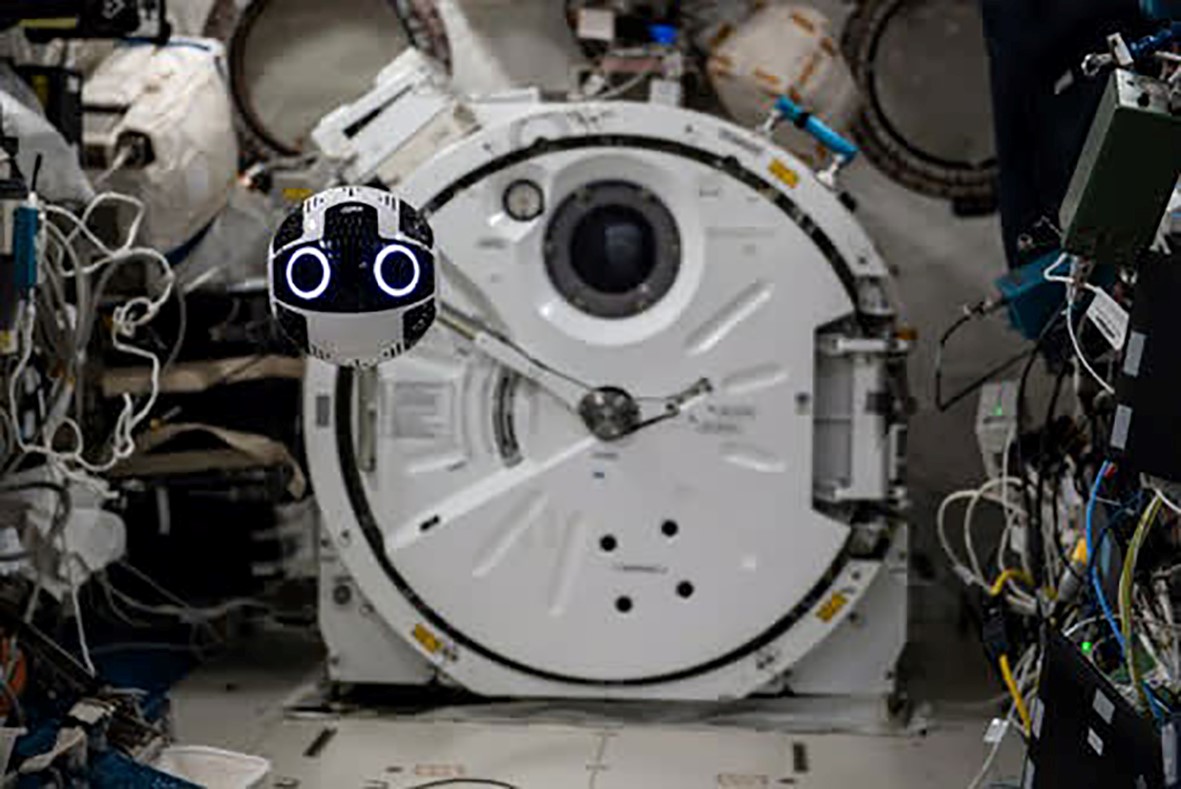
Int-Ball2 during flight checkout© JAXA/NASA
Int-Ball2 is an onboard drone robot that aims to support astronauts on the ISS. It is operated remotely by ground control and is able to fly around the ISS taking photos and videos. The camera is used to capture images of the astronauts as they conduct various experiments and are shared with the ground control team. Currently, the astronauts working in Kibo have to spend time adjusting the camera settings and angle of view. With the Int-Ball2, the ground control team can directly control the video shooting process remotely. This is expected to significantly reduce the astronaut workload.
While aboard the ISS, Japanese astronaut Satoshi Furukawa worked with ground controllers to perform initial functional checks on Int-Ball2.
Int-Ball2 is designed to automatically depart and return to its docking station for recharging. but in the ISS, it must navigate in a micro-gravity environment. To do so, it is required to estimate its 3DoF position (X, Y, Z) and 3DoF rotational attitude (roll, pitch, and yaw). Int-Ball2 estimates its position by fusing Visual Simultaneous Localisation and Mapping (VSLAM) and IMU data. JAXA has successfully demonstrated Int-Ball2's flight capabilities as well as functional confirming the automated release and docking.
The Epson IMU used in Int-Ball2 testing is a small, lightweight, yet extremely precise device that helps estimate spatial position and rotational attitude during its flight.
Main features of the M-G370 series
• Uses an original crystal gyroscopic sensor for high precision and stability
• Gyro bias instability 0.8°/√h Angle random walk 0.06-0.03°/√h
• Compact and lightweight (1" square and 10 grams)
• Low power design (3.3 V, 16 mA)
M-G370T connector face
In February 2024, the new M-G370PDT, with improved angle random walk and linearity of the gyroscopic sensor, was added to the series lineup. The M-G370PDT can be used in the building of various applications.
Sample applications include:
• Vibration control for small satellites1 that use commercial and industrial products, EO/IR camera gimbals2 and antennas
• Vibration, angle, and orbit measurements for unmanned equipment (industrial drones, terrestrial vehicles, ocean bottom exploration probes) and industrial equipment
• Navigation systems
Please see the links below for further product details.
https://global.epson.com/products_and_drivers/sensing_system
Picture credit
Follow Epson on social media:
LinkedIn: @Epson-Australia
Facebook: @EpsonAustralia
Twitter: @EpsonAust
YouTube: @EpsonAustralia
Instagram: @EpsonAust
1 This product and other Epson IMUs do not conform to the standards for use in space.
2 EO/IR camera gimbal: An electro-optical, infrared camera system
International Press Releases
Read them at: http://www.epson.co.jp/e/newsroom/newsroom_index.htm
- Home ›
- News & Events›
- Press Releases